Copyright 2020~2022 长沙华腾科技有限公司 All Rights Reserved 备案号:湘ICP备20015173号-5
技术支持:长沙华腾科技有限公司
栏目列表+
推荐内容
作者:Evan;来源:;浏览人数: 219;发布于:2022-08-22 14:08:49;
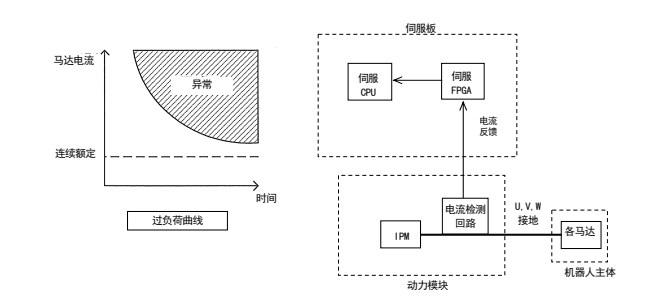
错误信息:第XX轴的U相电流负荷。
错误处理:马达电源关断
错误复位 :可以
内容:
根据机器人手臂姿态,可能会马达三相的一相流过大直接电流。如果这样状态持续,即使马达过载不发生,也导致电线烧毁。
主要原因:
机器人在伺服开(ON)状态下就保持位姿停止一定时间。
对策:
1.更改示教,以便减少出现错误的轴的负荷。(避免引起过载的示教,如机器人抓着工件就保持位姿水平。)
2.在保持机器人位姿停止一定时间时,进行伺服关(OFF)或把自动伺服关(OFF)功能设为有效。
返回顶部
Copyright 2020~2022 长沙华腾科技有限公司 All Rights Reserved 备案号:湘ICP备20015173号-5
技术支持:长沙华腾科技有限公司