Copyright 2020~2022 长沙华腾科技有限公司 All Rights Reserved 备案号:湘ICP备20015173号-5
技术支持:长沙华腾科技有限公司
栏目列表+
推荐内容
作者:Evan;来源:;浏览人数: 219;发布于:2022-08-19 14:11:20;
错误信息:轴XX电机过载。
错误处理:马达电源关断
错误复位 :可以
内容:
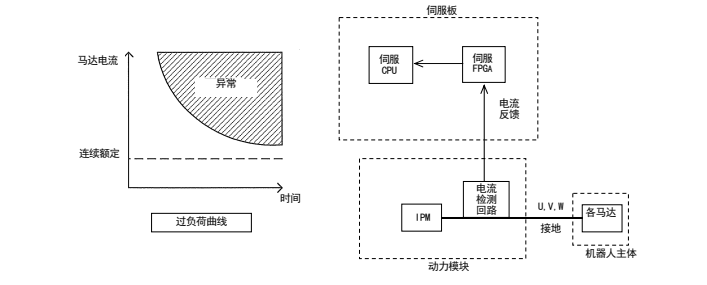
动力模块来的反馈电流过了马达的额定连续电流并过了允许时间。基于如下图所示的数据(过负荷曲线),伺服组软件检测此错误。
主要原因:1.机械因素:
(1)马达电源线U相、V相或w相断路。(没有断路检查)
(2)马达刹车没有被释放。
(3)动力模块有问题。(1)机器人手臂与夹具等之间有接触。
(2)电缆等被机器人手臂挂住。
(3)减速器、齿轮、轴承等已损坏。
(4)齿轮减速部件的齿隙过小。
(5)负荷重量过了机器人的规定能力。
(6)机器人动作模式出了马达的额定值(因急速逆转运动等)。
(7)马达的刹车未释放。
(8)气弹簧的气压低于额定值。(使用气弹簧的机身时。)
2.电气因素:
(4)伺服板有问题。
(5)马达有问题。
对策:
1.如果机器人手臂与什么东西发生干涉,用示教模式将其缩回。然后,检查驱动部件、减速器等有没有问题,检查有没有因手臂变形而产生位置偏差。
2.如果有零件(减速器等)已损坏,请检查并必要时更换它们。
3.如果是负荷的重量或动作图形导致故障,请重新检查机器人的操作条件。
4.如果是电气因素引起出错,请检查伺服放大器部、MC单元、供电单元、马达等部件。如有必要,更换它们。(E1x/E2x/E3x/E4x/E9x)
如果是电气因数引起出错,请检查伺服放大器部、电源单元、马达等部件。如有必要,更换它们。(E7x)
5.检查气弹簧的气压、状态,如有必要,补充气体或更换气弹簧。
返回顶部
Copyright 2020~2022 长沙华腾科技有限公司 All Rights Reserved 备案号:湘ICP备20015173号-5
技术支持:长沙华腾科技有限公司